


منظور از توانائي ماشينكاري يك ماده چگونگي تأثيرگذاري متقابل جنس ابزار برنده، جنس قطعه كار و شرایط ماشينكاري است. دقت محصولات توليد شده بيش از هر چيز تابع دقت ابزار، به ويژه تابع دوام ابزار است و يك عمر طولاني ابزار به معناي ساييدگي كم ابزار است. به اين جهت مواد برنده، براي اينكه ساييدگي آنها كم شده و از پريدگي لبه هاي آن ها جلوگيري به عمل آيد، بايستي داراي خصوصيات زير باشند:
- سختي و قابليت حفظ سختي
- مقاومت در مقابل زنگ خوردگي
- حداقل نفوذپذيري
- حداقل تمايل به چسبندگي در مقابل جنس قطعه كار
- رفتار جنس قطعه كار در سطح برش، در محل جدا شدن لايه براده و در محل تماس با ابزار نيز بر توانائي ماشينكاري تأثير مي گذارد...
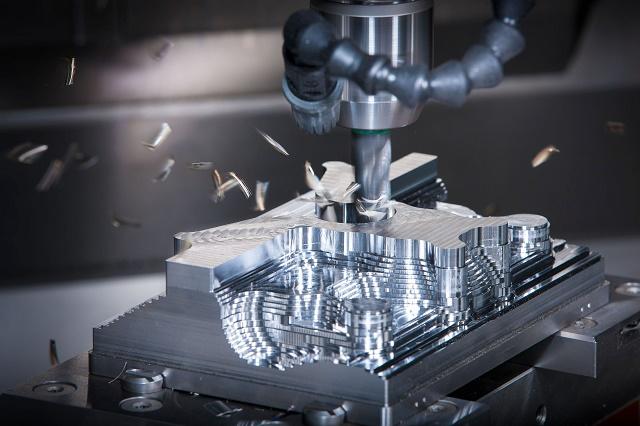
گزارش کار آزمایش های انجام شده در کارگاه توانایی ماشینکاری (Machining Capability Workshop Experiments)، مشتمل بر 6 بخش، 88 صفحه، تایپ شده، به همراه تصاویر، با فرمت pdf به ترتیب زیر گردآوری شده است:
- بررسی اثر جنس قطعه کار بر روی پارامترهای خروجی ماشینکاری
- بررسی اثر زاویه تنظیم اصلی بر روی پارامترهای خروجی ماشینکاری
- بررسی اثر سرعت براده برداری بر روی پارامترهای خروجی ماشینکاری
- بررسی اثر سرعت پیشروی بر روی پارامترهای خروجی ماشینکاری
- بررسی اثر زاویه براده بر روی پارامترهای خروجی ماشینکاری
- بررسی اثر عمق برش بر روی پارامترهای خروجی ماشینکاری
* توجه: لازم به ذکر است که به همراه فایل گزارش کار بالا، فایل های زیر نیز جهت دانلود قرار داده شده است:
- جزوه توانایی ماشینکاری دکتر محمدرضا رازفر (26 صفحه با فرمت pdf)
- جزوه انیورسال عمومی دکتر محمدرضا رازفر (49 صفحه با فرمت pdf)
- جزوه ابزار شناسی و ماشینکاری دکتر پرویز کهال (170 صفحه با فرمت pdf)
- نرم افزار محاسبه سرعت برشی (Velocity Cutting)
- نرم افزار انتخاب پارامترهای CBN به همراه فایل راهنما (CBN Parameter Selector)
- لیست آزمایشات کارگاه توانایی ماشینکاری
- فرم خام آزمایشات فرآیند تراشکاری به همراه توضیحات و علائم اختصاری
- مقاله 1: تکنولوژی براده برداری، اطلاعات کاربردی و روش های صحیح انتخاب ابزار قلاویز
- مقاله 2: فرسایش در ابزارهای برش
- مقاله 3: طراحی و پیاده سازی سیستم جستجو ابزار برشی
- مقاله 4: تاثیر دما و ساختار مواد قطعه کار بر کوانتوم های انرژی در فرآیند برش
- مقاله 5: بررسي اثر ذرات فوق ريز كاربيد تنگستن و نوع بايندر بر خواص مكانيكي و عملكرد ماشينكاري سرمت هاي WC-Ni-Co و WC-Ni
- مقاله 6: معرفی یک روش جدید برای ماشینکاری کاربیدهای سمانته
- مقاله 7: انواع براده شکن ها و کاربردهای آنها
- مقاله 8: مدلسازی و شبیه سازی چتر در فرزکاری با استفاده از مدل پیش بینی نیرو
- مقاله 9: فرزکاری سرعت بالای قطعات سخت شده

جهت دانلود گزارش کار آزمایش های انجام شده در کارگاه توانایی ماشینکاری (Machining Capability Workshop Experiments) به همراه ضمائم، بر لینک زیر کلیک نمایید.









.jpg)


 در نرم افزار CATIA") آموزش کتیا، طراحی و مدلسازی رینگ چرخ خودرو (Wheel Rims) در نرم افزار CATIA
آموزش کتیا، طراحی و مدلسازی رینگ چرخ خودرو (Wheel Rims) در نرم افزار CATIA کتاب مدلسازی فضایی با نرم افزار سالیدورکس و ان ایکس
کتاب مدلسازی فضایی با نرم افزار سالیدورکس و ان ایکس دانلود پروژه بهینه سازی اتصالات چسبی در کامپوزیت ها
دانلود پروژه بهینه سازی اتصالات چسبی در کامپوزیت ها کامپوزیت هاي زمینه پلیمري
کامپوزیت هاي زمینه پلیمري بررسی سرامیک ها و اهمیت اتصال در آنها
بررسی سرامیک ها و اهمیت اتصال در آنها آموزش مدلسازی، مونتاژ، ورقکاری، نقشه کشی، شبیه سازی نرم افزار اتودسک اینونتور
آموزش مدلسازی، مونتاژ، ورقکاری، نقشه کشی، شبیه سازی نرم افزار اتودسک اینونتور آموزش مقدماتی تا پیشرفته نرم افزار اتودسک اینونتور
آموزش مقدماتی تا پیشرفته نرم افزار اتودسک اینونتور تحلیل اتصالات چسبی فلز به کامپوزیت در کاربردهای فضایی
تحلیل اتصالات چسبی فلز به کامپوزیت در کاربردهای فضایی دانلود 7 کتاب مرجع آموزش کامپوزیت ها
دانلود 7 کتاب مرجع آموزش کامپوزیت ها دانلود نمونه سوالات امتحانی و تمرینات حل شده درس مکانیک محیط های پیوسته
دانلود نمونه سوالات امتحانی و تمرینات حل شده درس مکانیک محیط های پیوسته مکانیک محیط های پیوسته برای مهندسین به همراه تشریح کامل مسائل
مکانیک محیط های پیوسته برای مهندسین به همراه تشریح کامل مسائل جزوه مبانی سیستم انتقال قدرت در خودروهای سواری
جزوه مبانی سیستم انتقال قدرت در خودروهای سواری آموزش جامع ماشین ابزار تولیدی
آموزش جامع ماشین ابزار تولیدی لوله های انتقال نفت و گاز") مجموعه آموزش جامع (جوش، بازرسی، عیوب، دستورالعمل) لوله های انتقال نفت و گاز
مجموعه آموزش جامع (جوش، بازرسی، عیوب، دستورالعمل) لوله های انتقال نفت و گاز دانلود کتاب آموزشی و مجموعه کدهای تخمین حالت و پارامتر با فیلتر کالمن
دانلود کتاب آموزشی و مجموعه کدهای تخمین حالت و پارامتر با فیلتر کالمن مقدمه ای بر مکانیک محیط های پیوسته به همراه تشریح کامل مسائل
مقدمه ای بر مکانیک محیط های پیوسته به همراه تشریح کامل مسائل طراحی قالب بادی بطری روغن موتور با CATIA و تحلیل آن با نرم افزار MoldFlow
طراحی قالب بادی بطری روغن موتور با CATIA و تحلیل آن با نرم افزار MoldFlow بهینه سازی اتصالات چسبی در کامپوزیت ها
بهینه سازی اتصالات چسبی در کامپوزیت ها آموزش شبکه عصبی مصنوعی به همراه تشریح کامل مسائل
آموزش شبکه عصبی مصنوعی به همراه تشریح کامل مسائل بررسی اجزاء ماشین و سیستم های انتقال قدرت
بررسی اجزاء ماشین و سیستم های انتقال قدرت ماشینکاری سه بعدی کانتور در نرم افزار NX CAM
ماشینکاری سه بعدی کانتور در نرم افزار NX CAM بررسی علت تخریب دیرگداز دولومیتی مورد استفاده در پاتیل فولاد سازی
بررسی علت تخریب دیرگداز دولومیتی مورد استفاده در پاتیل فولاد سازی آموزشی طراحی، ساخت و نصب مخازن ذخیره
آموزشی طراحی، ساخت و نصب مخازن ذخیره مکانیزم های تخریب آلیاژهای مهندسی در صنایع نفت، گاز و پتروشیمی
مکانیزم های تخریب آلیاژهای مهندسی در صنایع نفت، گاز و پتروشیمی